



常用的裝配機器人主要有可編程通用裝配操作手 (Programmable Universal Manipula-tor forAssembly)即 PUMA 機器人(最早出現于1978年,工業機器人的祖始)和平面雙關節型機器人 (Selective Compliance Assembly Robot Arm)即SCARA機器人兩種類型。

自動組裝機器人
與一般工業機器人相比,裝配機器人具有精度高、柔順性好、工作范圍小、能與其他系統配套使用等特點,主要用于各種電器的制造行業。
裝配機器人的基本類型與結構
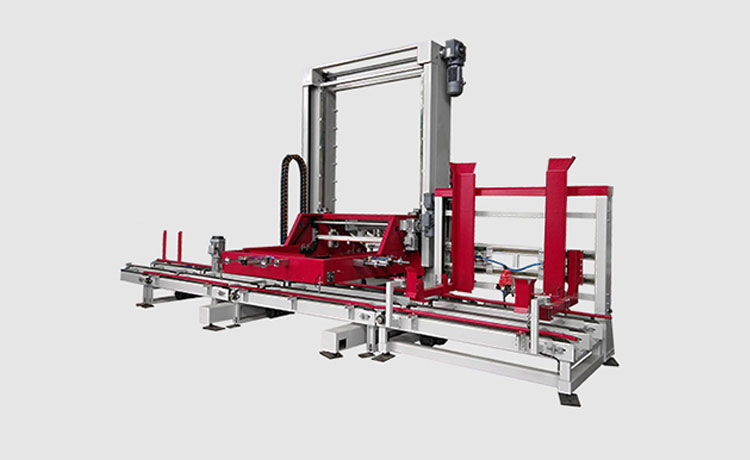
PUMA 機器人 美國 Unimation 公司1977年研制的PUMA是一種計算機控制的多關節裝配機器人。一般有 5或6個自由度,即腰、肩、肘的回轉以及手腕的彎曲、旋轉和扭轉等功能(圖1)。其控制系統由微型計算機、伺服系統、輸入輸出系統和外部設備組成。采用VALⅡ作為編程語言,例如語句“APPRO PART,50”表示手部運動到PART上方50mm處。PART的位置可以鍵入也可示教。VAL具有連續軌跡運動和矩陣變換的功能。
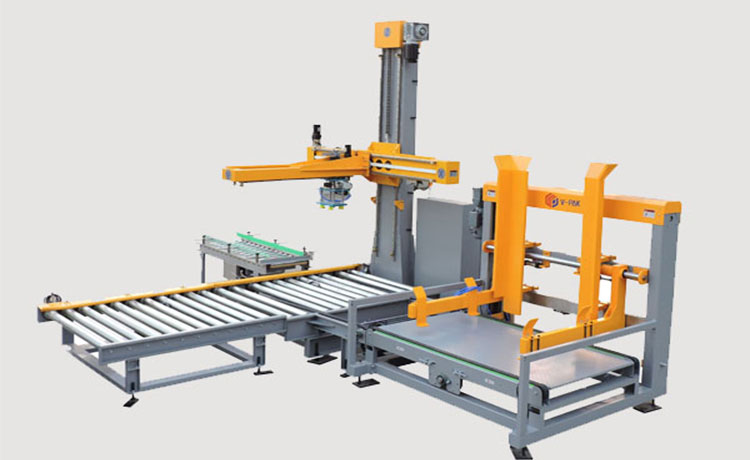
SCARA機器人 大量的裝配作業是垂直向下的,它要求手爪的水平(X,Y)移動有較大的柔順性,以補償位置誤差。而垂直 (Z)移動以及繞水平軸轉動則有較大的剛性,以便準確有力地裝配。
另外還要求繞Z 軸轉動有較大的柔順性,以便于鍵或花鍵配合。日本山梨大學研制出SCARA機器人,它的結構特點滿足了上述要求(圖2)。其控制系統也比較簡單,如SR-3000機器人采用微處理機對θ1、θ2、Z 三軸(直流伺服電機)實現半閉環控制,對s 軸(步進電機)進行開環控制。編程語言采用與 BASIC相近的SERF。
最新版本Level4具有坐標變換、直線和圓弧插補、任意速度設定、以文字命名的子程序以及檢錯等功能。SCARA機器人是目前應用較多的類型之一。
