



近年來,跨國機器人巨頭們紛紛推出七軸工業機器人,以搶占高端新市場,這引發了我們對于七軸工業機器人的深入思考,它具有哪些獨特的技術優勢,存在哪些研發難點,近年來國際上發布了哪些工業七軸機器人產品,我國七軸工業機器人的研發及產業化又進入了哪一階段?

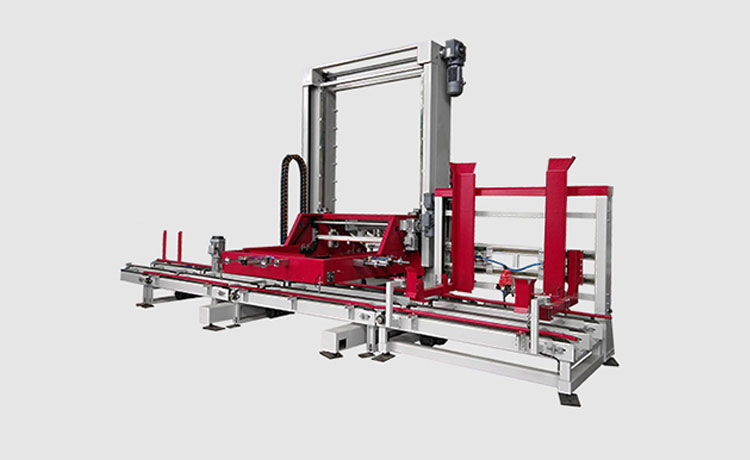
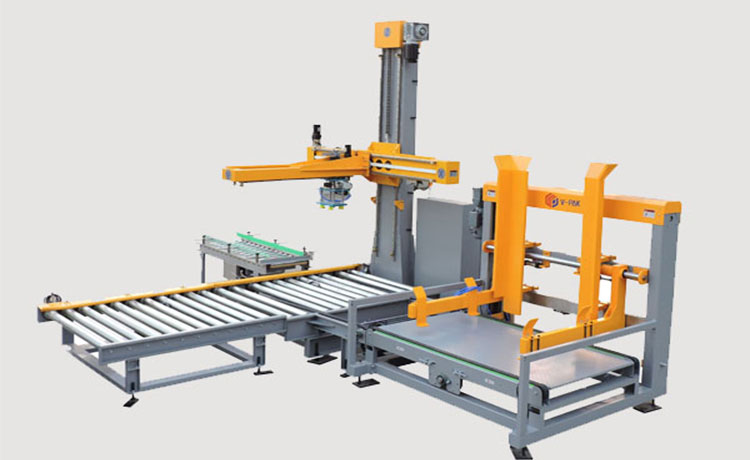
自動組裝機器人
六軸機器人可以穿過x,y,z軸,同時每個軸可以獨立轉動。七軸機器人又稱為冗余機器人,相比六軸機器人額外的軸允許機器人躲避某些特定的目標,便于末端執行器到達特定的位置,可以更加靈活的適應某些特殊工作環境。隨著軸數的增加,機器人的靈活性也隨之增長。
但是,在目前的工業應用中,用得最多的是三軸、四軸和六軸的工業機器人,這是因為,在某些應用中,并不需要很高的靈活性,而三軸和四軸機器人具有更高的成本效益,并且三軸和四軸機器人在速度上也具有很大的優勢。未來,在需要高靈活性的3C產業,七軸工業機器人將擁有用武之地,隨著其精度不斷增加,在不遠的將來,它將取代人工進行裝配手機等精密電子產品。
七軸工業機器人比六軸工業機器人強在哪?
從技術上來看,六軸工業機器人存在什么問題,七軸工業機器人又強在哪?
1、容錯性
機器人在發生故障時,如果有一關節失效,傳統六軸機器人便無法繼續完成工作,而七軸機器人可以通過重新調整故障關節速度(運動學容錯)和故障關節力矩(動力學容錯)的再分配實現繼續正常工作。
2、改善動力學特性
對于七軸機器人而言,利用其冗余自由度不僅可以通過運動軌跡規劃達到良好的運動學特性,并且我們可以利用其結構實現最佳的動力學性能。七軸機器人可實現關節力矩的再分配,這里涉及到機器人的靜力平衡的問題,也就是說,作用在末端的力,通過一定的算法算出每個關節承受的力有多大。對于傳統的六軸機器人來說,其每個關節的力是一定的,它的分配可能很不合理。但是對于七軸機器人來說,可以通過控制算法調整各個關節的力矩,讓薄弱的環節承受的力矩盡量小,是整個機器人的力矩分配比較均勻,更加合理。
3、改善運動學特性
在機器人的運動學問題中,三個問題使得機器人的運動受到非常大的限制。
第一是奇異構型。當機器人處于奇異構型時,它的末端執行器不能繞某個方向進行運動,或者施加力矩,因而奇異構型極大的影響了運動規劃。
第二是關節位移超限。在真實工作情況下,機器人每個關節的運動的角度范圍是受到限制的,最理想的狀態是正負180度,但是很多關節是做不到的。另外,七軸機器人可以避免角速度運動過快,讓角速度分配得比較均勻。
七軸機器人各軸運動范圍及最大角速度
第三是工作環境中存在障礙。在工業環境下,很多場合存在各種環境障礙,傳統的六軸機器人無法只改變末端機構的姿態,而不改變末端機構的位置。
