



應用機器人是一個長遠的投資,便當管理,同時也可以保證產品的良品率,進步消費率,并且完好自動化應用的工廠,自然也給客戶一個穩定的支柱。

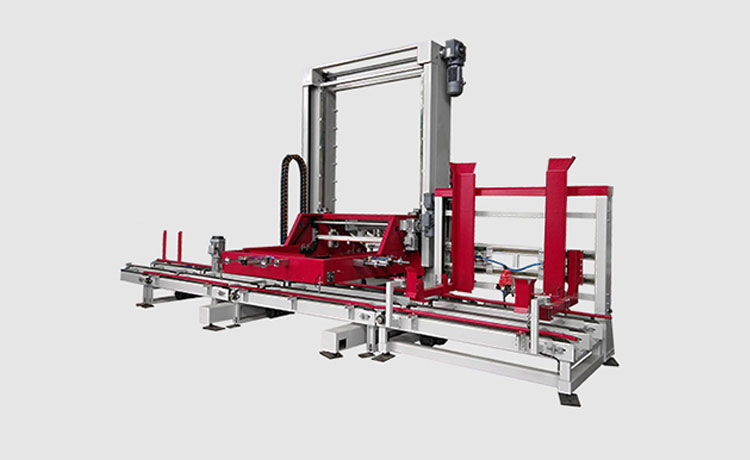
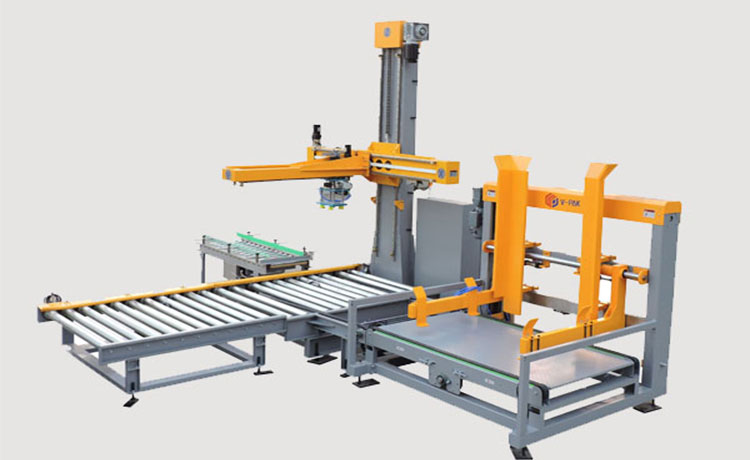
自動組裝機器人
所以隨著機器人第七軸的出現,與機器人成功配合的應用,使機器人更為柔性化,利用空間更大化,所以機器人代替人工是遲早的事。
誤區一:低估了有效負荷和慣性
有效負荷非常重要,普通機器人技術參數給出的一些信息,都有細致的說明,額定負載是在額定速度的情況才是有效的,抵達最大負載的其中一個重要條件就是要除低機器人運轉速度,另外過大負載也有可能破壞機器人的精度。
誤區二:試圖讓機器人做過多事情
在運用機器人之前,一定要經過模擬仿真,按照設計央求,肯定機器人的應用的行程負載,還有周期時間,假定增加機器人新的應用,先中止一定的考證后再進入。
誤區三:低估了電纜的管理問題
目前運用的機器人末端執行器(end-effector),普通是氣體驅動或電器驅動的,無可避免的會有相應的氣管或電纜銜接。大部分的工業機器人的氣路和電器回路是走外面的,所以機器人運動控制的時分要相當的留意;也有一部的工業機器人的氣路和電氣回路是內置的,這時就非常的便當,只需思索手臂與末端執行器的相對運動時線纜的管理就可以的。
誤區四:在選擇機器人系統之前應思索的問題
關于環境來說,不同的環境,會有特地定制的工業機器人,比如噴涂行業需求的是有防爆才干的工業機器人,這與標準的機器人就有所不同,還有潔凈室的運用等等。還有機器人的可靠性與其缺陷率,消耗的電力等等都是在選用是必需求思索的問題。
誤區五:對精確性和可重復性的誤解
精確性與機械手臂的機械精度有著極大的關系,精度越高,才干保證有精確的高速度,機器人減速器是保證機器人精度的一個重要的關鍵結構。普通的工業機器人都是選用RV類型的標準減速器,假定需求應用于一些精度制造方面的應用,可以思索選用機器人始祖staubliunimation的工業機器人。
誤區六:選擇機器人系統只依賴于控制系統的優劣
機械部分是首先保證工業機器人性能的關鍵,精度,速度和耐用度,都于機械部分有著及大的關系。機器人的機構組成比較簡單,普通就是馬達與減速器,假定選用的機器人經常需求維修減速器部分,或其他機械結構,那是非常省事的。
誤區七:沒有正確的機器人學問
工業機器人是很特殊的設備,其操作復雜程度絲毫不亞于一臺數控機床。同樣的,運用機器人的必需求熟習基本的工業機器人的安全操作學問,否則對設備對人都是非常不安全的。運用機器人的操作員,一定要由系統制造商中止系統的安全操作培訓后,才允許理論操作。
誤區八:忽視了機器人應用的相關設備
在中止項目的開端階段,必需求明白項目所需求配置的相關設備,軟件等一系列內容。采購過程中,要時辰按照項目的應用來思索訂購的相關產品。
誤區九:過高或過低估量機器人控制系統才干
過低地估量機器人控制系統才干將會產生系統重復投資和不用要的糜費。在安全電路上采用雙重備份非常的普遍。而過高的估量控制系統才干將會產生額外設備本錢、返工以及誤工費用等嘗試控制太多的I/O端口和增加伺服系統是一個常見的誤區。
誤區十:根本就沒有思索到運用機器人技術
遭到投資范圍的限制,缺乏對機器人技術的了解的人和過去在采用機器人方面有失敗的嘗試是很多人遠離機器人技術的理由。但是為了進步消費率和在市場的最終競爭中獲勝,非常重要的是擺脫這方面的誤機器人技術固然不能單獨進步消費率,但是在很多情況下它能輔佐進步整體消費效率.市場反響時間、增加的消費效率、簡單的操作、靈活性、可重復運用、可靠性、精密度、控制才干以及能夠長期運用,這些都是采用機器人技術強有力的緣由。
