




在設計和布置噴涂機器人系統時,為使操作員、編程員和維修人員能得到恰當地安全防護,應按照噴涂機器人制造廠的規范進行。為確保噴涂機器人及其系統與預期的運行狀態相一致,則應評價分析所有的環境條件,包括爆炸性混合物、腐蝕情況、濕度、污染、溫度、電磁干擾(EMI)、射頻干擾(RFI)和振動等是否符合要求,否則應采取相應的措施。
噴涂機器人的安全防護空間:
安全防護空間是由噴涂機器人外圍的安全防護裝置(如柵欄等)所組成的空間。確定安全防護空間的大小是通過風險評價來確定超出噴涂機器人限定空間而需要增加的空間。一般應考慮當噴涂機器人在作業過程中,所有人員身體的各部分應不能接觸到噴涂機器人運動部件和末端執行器或工件的運動范圍
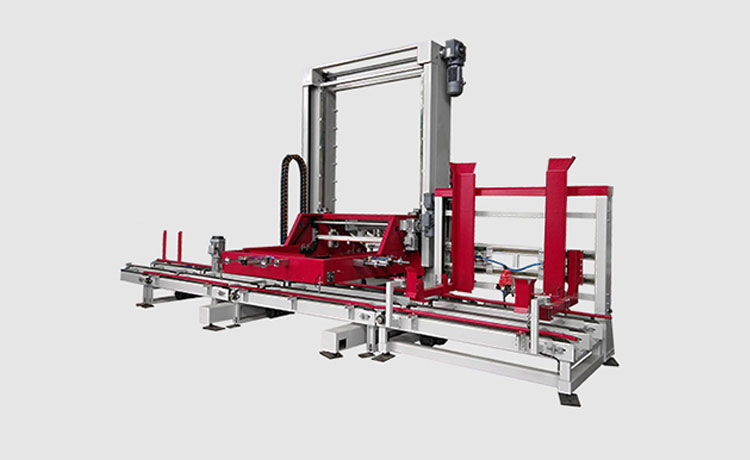
噴涂機器人系統的布局:
控制裝置的機柜宜安裝在安全防護空間外。這可使操作人員在安全防護空間外進行操作、啟動噴涂機器人運動完成工作任務,并且在此位置上操作人員應具有開闊的視野,能觀察到噴涂機器人運行情況及是否有其他人員處于安全防護空間內。若控制裝置被安裝在安全防護空間內時,則其位置和固定方武能滿足在安全防護空間內各類人員安全性的要求。
噴涂機器人系統的布置應避免噴涂機器人運動部件和與噴涂機器人作業無關的周圍固定物體和設備(如建筑結構件、共用設施等)之間的擠壓和碰撞,應保持有足夠的安全間距,一般最少為0.5 m。但那些與噴涂機器人完成作業任務相關的設備和裝置(如物料傳送裝置、工作臺、相關工具臺、相關機床等)則不受約束。
當要求由噴涂機器人系統布局來限定噴涂機器人各軸的運動范圍時,應按要求來設計限定裝置,并在使用時進行器件位置的正確調整和可靠固定。在設計末端執行器時,應使其當動力源(電氣、液壓、氣動、真空等)發生變化或動力消失時,負載不會松脫落下或發生危險(如飛出);同時,在噴涂機器人運動時由負載和末端執行器所生成的靜力和動力及力矩應不超出噴涂機器人的負載能力。
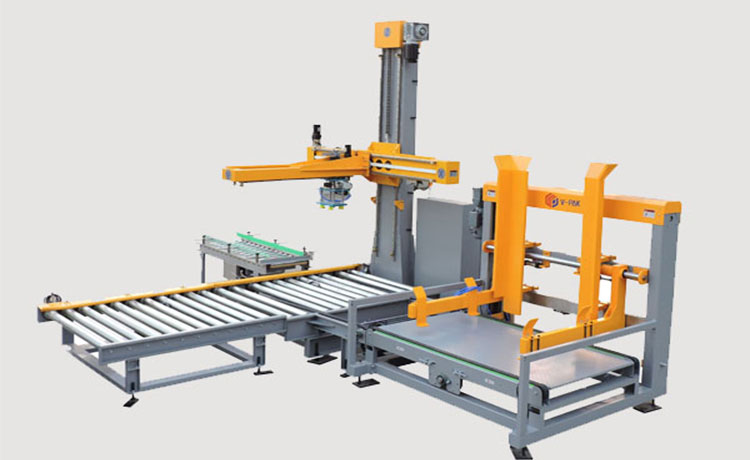
噴涂機器人系統的布置應考慮操作人員進行手動作業時(如零件的上、下料)的安全防護。可通過傳送裝置、移動工作臺、旋轉式工作臺、滑道推桿、氣動和液壓傳送機構等過渡裝置來實現,使手動上、下料的操作人員置身于安全防護空間之外。但這些自動移出或送進的裝置不應產生 新的危險。
