



“‘十三五’期間,精密減速器、高性能伺服驅動系統、智能控制器、智能一體化關節等機器人關鍵部件加快突破、創新成果不斷涌現,整機性能大幅提升、功能愈加豐富,產品質量日益優化。”王衛明表示,但是與世界先進水平相比,我國機器人產業還存在一定差距,比如關鍵零部件質量穩定性、可靠性等還不能滿足高性能整機的需求,高速、高精、重載等高性能整機產品供給缺乏等。
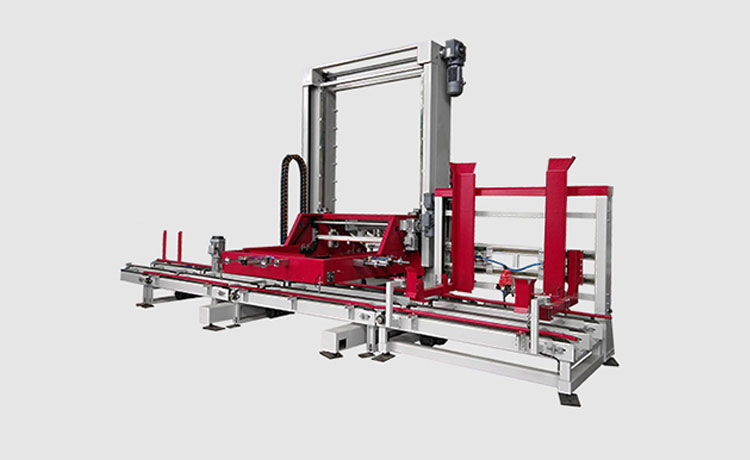
焊接機器人
魏琪嘉認為,盡管我國在工業機器人相關基礎零部件方面已擁有一定基礎,但是無論從質量、可靠性、產品系列,還是批量化供給方面都與國外產品有較大差距,特別是在高性能交流伺服電機和高精密減速器方面差距明顯。“我國目前自主生產的機器人核心關鍵零部件大量依靠進口,因此出現性價比低、核心技術受制于人、競爭力差等問題,須高度重視工業機器人零部件產業發展。”
為補齊工業機器人產業發展短板,《規劃》提出,推動用產學研聯合攻關,提升機器人關鍵零部件的功能、性能和可靠性。其中,在“機器人關鍵基礎提升行動”中,對機器人零部件提出具體目標:研發RV減速器和諧波減速器的先進制造技術及工藝,提高減速器的精度保持性(壽命)、可靠性,降低噪音,實現規模生產;優化高性能伺服驅動控制、伺服電機結構設計、制造工藝等技術,研制高精度、高功率密度的機器人專用伺服電機及高性能電機制動器等核心部件;研發具有高實時性、高可靠性、多處理器并行工作或多核處理器的控制器硬件系統;突破多關節高精度運動解算、運動控制及智能運動規劃算法,提升控制系統的智能化水平及安全性、可靠性和易用性。
加快提升產業創新能力
技術積累不足,原創性研究、理論研究、系統設計能力欠缺也是制約我國工業機器人發展的瓶頸。如何提升工業機器人產業創新能力?在宋曉剛看來,一方面要聚焦產業發展需求,突破機器人系統開發、操作系統等共性技術;另一方面要鼓勵骨干企業聯合開展機器人協同研發,推動軟硬件系統標準化和模塊化,提高新產品研發效率。
“雖然國內企業在機器人技術上與國外有明顯差距,但在實際應用工業機器人的系統集成項目中,影響系統精度及可靠性的因素很多。這不僅由機器人本身所決定,還包括控制系統、附屬夾具、傳輸設備精度、視覺傳感器等因素。”魏琪嘉告訴記者,鼓勵系統開發商和機器人企業協調發展,利用系統集成領域的技術優勢彌補國產機器人單體技術的不足,從而能夠使整體解決方案在市場上具備與國際巨頭企業競爭的能力。
“要發揮機器人重點實驗室、工程(技術)研究中心、創新中心等研發機構的作用,加強前沿、共性技術研究,加快創新成果轉移轉化,構建有效的產業技術創新鏈。同時,推進人工智能、5G、大數據、云計算等新技術融合應用,提高工業機器人智能化和網絡化水平。”宋曉剛說。
【來源:經濟日報】
